服务咨询热线:
13986047333服务咨询热线:
13986047333


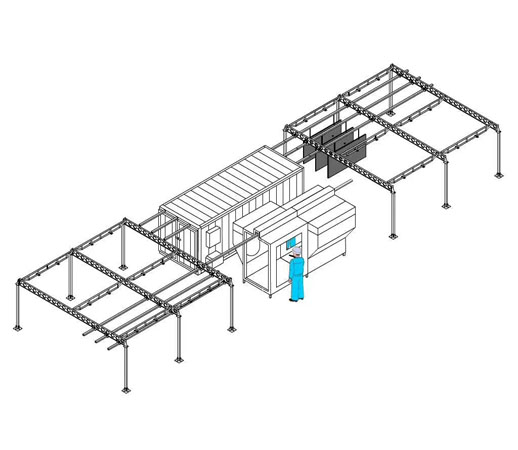
在湖北某新能源汽车电池包生产车间,六轴机械臂正以流畅的弧线轨迹完成涂装作业:喷枪与工件表面始终保持200mm恒定距离,漆膜厚度在0.12-0.15mm范围内波动,而整个喷涂周期仅耗时18秒。这套由湖北喷漆设备厂家研发的机器人喷涂系统,通过机械结构、控制算法与工艺软件的深度融合,正在重新定义工业涂装的技术边界。
技术原理:从机械重复到智能自适应的跨越
传统喷涂机器人多依赖示教器编程,难以应对复杂曲面的动态变化。某头部喷漆设备厂家通过“离线编程+实时补偿”双模控制架构,突破了这一局限:
三维建模与路径规划:采用激光扫描仪对工件进行毫米级精度建模,离线编程软件基于曲面法向量自动生成喷枪轨迹,避免人工示教产生的0.3mm以上偏差;
六轴联动控制:机械臂各关节搭载高分辨率编码器,通过PID算法实现±0.05mm的重复定位精度。在喷涂5G通信设备腔体时,系统可同步调整腕部旋转角度,确保漆雾在深腔结构中均匀覆盖;
环境参数闭环反馈:在喷房内布置温湿度传感器与漆膜测厚仪,当环境温度波动超过3℃时,系统自动修正涂料粘度参数;当检测到局部漆膜偏薄时,立即触发机械臂进行二次补喷。
关键参数:节拍与精度的动态平衡术
喷漆设备厂家在研发过程中面临核心矛盾:提升节拍速度易导致漆膜流平性下降,而过度追求精度则会限制生产能力。某企业通过三项技术创新实现参数优化:
轻量化机械臂设计:采用碳纤维复合材料替代传统铝合金,将机械臂自重降低40%,惯性矩减小65%,使加速时间从0.8秒缩短至0.3秒;
高压静电雾化技术:在喷枪内部集成100kV高压发生器,将涂料颗粒细化至20-50μm,减少过喷量30%的同时,缩短漆膜干燥时间25%;
动态节拍控制:根据工件复杂度自动切换运行模式:简单平面件采用30秒/件的经济模式,复杂曲面件切换至15秒/件的强化模式,通过变频驱动技术避免机械冲击。
应用场景:精密涂装的技术价值释放
在新能源汽车电池包涂装领域,该系统展现出独特的技术优势:针对铝合金壳体的电泳涂层缺陷,机器人可精准控制喷枪角度,使边角部位涂层厚度达标率从72%提升至95%;在5G通信设备散热腔体喷涂中,通过调整喷枪雾化压力与机械臂摆动频率,实现0.08mm超薄漆膜的均匀覆盖,满足高频信号传输的介电损耗要求。
产业重构:从设备供应商到涂装解决方案伙伴
随着2025年全球工业涂装机器人市场规模突破80亿美元,喷漆设备厂家的角色正在发生根本性转变。某企业已从单纯提供硬件设备,升级为提供“仿真设计-安装调试-工艺优化”全链条服务:在项目前期,通过数字孪生技术模拟喷涂过程,提前识别干涉风险;在量产阶段,基于大数据分析持续优化喷涂参数,使某客户产线的涂料利用率从58%提升至75%。
从机械臂的毫米级定位,到漆膜的微米级控制,再到生产节拍的秒级响应——喷漆设备厂家的技术进化,本质上是将工业美学融入精密制造的过程。当六轴机械臂在三维空间中划出优美的轨迹,当离线编程软件将复杂曲面转化为可执行代码,当传感器网络实时捕捉每一个工艺变量,工业涂装终于突破了人工经验的局限,在机器人喷涂系统的驱动下,迈向更智能、更可持续的制造新时代。
Copyright © 2002-2023 武汉浩天龙涂装设备有限公司 版权所有
备案号:鄂ICP备2022001047号-1 |
 鄂公网安备42011502001786号
鄂公网安备42011502001786号
13986047333